

Decisions are made minute-to-minute
Decisions are made minute-to-minute
Most “recent imagery” services aren’t truly live and can’t be directed on the fly—leaving teams to act on stale views of fast-changing situations.
Satellite imagery = near-real-time, not real-time
Satellite imagery = near-real-time, not real-time
Even the fastest commercial constellations talk about near real-time with revisit cycles and delivery delays (often minutes to hours). Tasking is indirect, weather/occlusion is common, and you don’t pilot the sensor.
Traditional “drone mapping” = delayed products
Traditional “drone mapping” = delayed products
Standard UAV mapping workflows capture, upload, and process before you see orthos or 3D outputs—great for documentation, not live maneuvering or rapid retask.
Video ≠ a map
Video ≠ a map
Standard drone flights or live feeds provide only a video recording of the flight path, not a usable, geo-referenced map of the area. That leaves teams without the spatial context required for coordination, planning, or rapid decision-making.
Our system delivers true real-time tactical mapping by stitching aerial imagery as it’s captured and instantly displaying it on the map. Instead of waiting for post-flight processing, operators see a live, continuously updated map of the area.
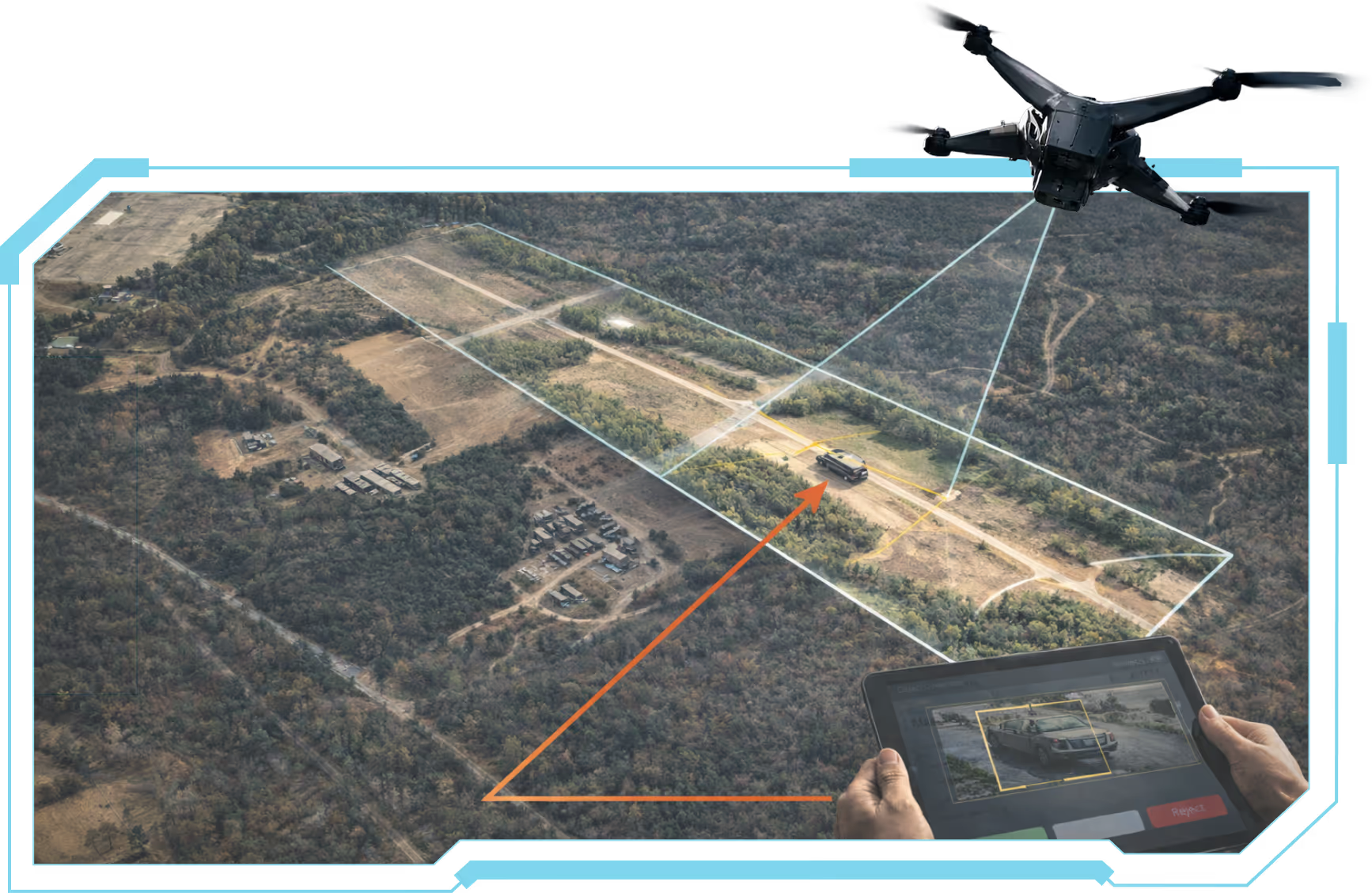
Real-time stitched imagery → Maps are generated on the fly, not after the mission.
Geo-referenced objects → Every feature is precisely located for immediate decision-making.
Actionable situational awareness → Operators gain a dynamic, evolving map that reflects changing conditions in real time.
SHARCS
Our tactical mapping system integrates seamlessly with SHARCS (Super-Human Automated Robotic Classification System), an advanced modular AI architecture for real-time object detection and classification.
With SHARCS, users gain three core capabilities:
Real-time identification and classification of objects in the field.
The ability to validate and correct AI detections instantly, improving accuracy on the spot.
User-driven tuning of machine learning models, enabling teams to refine AI performance for their specific mission needs.
Image Capture
Image Capture
Drones (or other unmanned systems) collect high-resolution imagery during flight.
Real-Time Processing
Real-Time Processing
The imagery is stitched, georeferenced and georectified in real-time.
Shared Situational Awareness
Shared Situational Awareness
Users see the live-updated map, including object detections flagged by SHARCS if needed.
Data Distribution
Data Distribution
Processed maps are streamed directly to the ATAK device, enabling rapid toggling between data from multiple sources and timeframes. Users can instantly identify environmental changes, such as new vehicle activity or infrastructure shifts, by swapping between historical and live imagery.

ATAK-LM has been rigorously tested in real-world operational environments, including:
JIFX (Joint Interagency Field Experimentation) – validating interoperability in complex, multi-user scenarios.
TReX (Test Resource Management Center Experimentation) – ensuring reliability, resilience, and mission readiness.

Weather Sensing UAS swarm
Real Object Detection with 3D positioning and awareness in space
Real-time detection and visualization
Attritiable Strike Platform
Long Range One Way Strike Platform
Compact, Deployable Strike Platform
Attritiable Strike Platform
US NDAA compliant flight controller
custom-designed UAS camera payload
modular hybrid electric propulsion system
next-generation generator
Description
Description