
Stationary Targets Required
Stationary Targets Required
Most drone landing systems rely on cooperation for their intended landing area, making them impractical for dynamic targets, like a moving vessel.
Unstable, Moving Decks
Unstable, Moving Decks
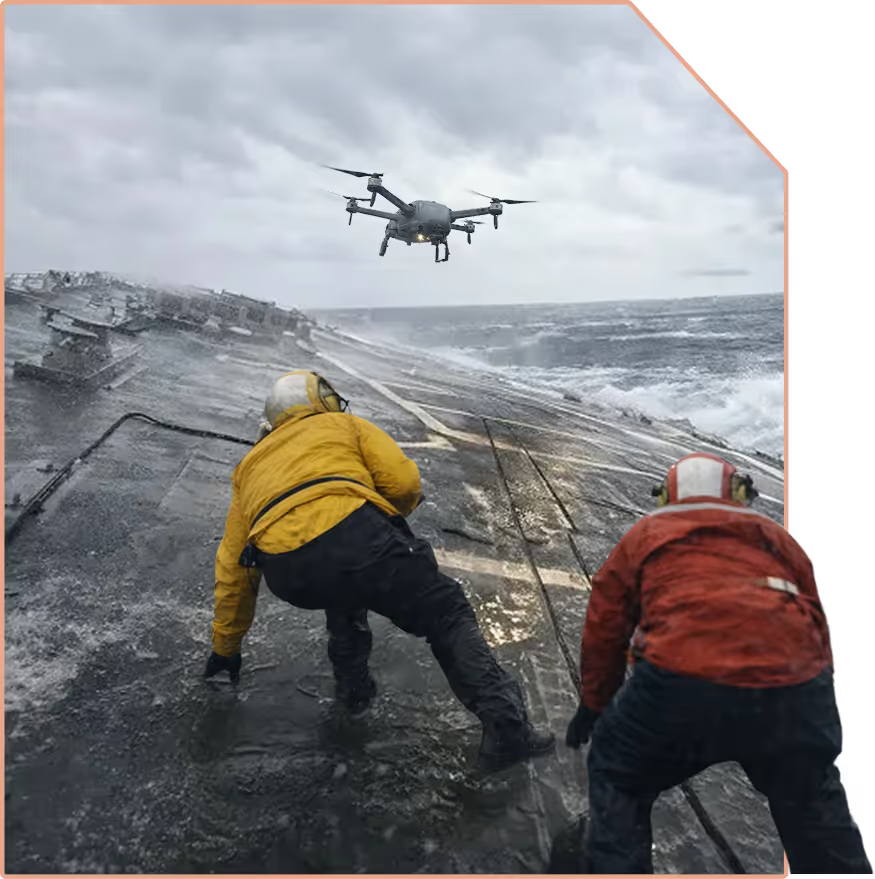
Ocean platforms introduce multi-axis motions—pitch, roll, yaw, heave, and sway—creating an unstable and unpredictably tilting landing surface that traditional methods aren’t built to handle.
Sensor and Visibility Constraints
Sensor and Visibility Constraints
GPS alone provides only meter-level accuracy. Visual systems struggle due to changing vantage points—objects can drift out of view, become partially obscured, or be distorted by perspective as the drone descends.
Environmental Factors
Environmental Factors
Wind, waves, glare from water, and GPS drift all compromise stability. Drones can’t hover accurately over fast-moving vessels, and features like return-to-home (RTH) often fail, leading to missed landings or crashes.
Delayed Responses & Limited Processing
Delayed Responses & Limited Processing
Many systems rely on offline post-processing or single-drone solutions, offering delayed mapping and insufficient adaptation to rapidly changing conditions.
The MACLUV (Modular Autonomous Capability for Landing on Uncooperative Vehicles) system is designed to solve the problem of autonomous precision landing on non-cooperative targets, such as moving ocean vessels, in challenging conditions.

MACLUV
By enabling drones to land reliably in dynamic and unpredictable environments, MACLUV creates possibilities that were previously impossible:
Rapidly deploy and recover mission-critical assets in contested or hard-to-reach environments without requiring pre-staged infrastructure.
Deliver ammunition to FLOT or mission critical equipment to the ship, safely and without manual intervention.
Extend drone delivery services to maritime vessels, moving platforms, and other environments previously inaccessible to traditional UAV landing systems.
Target Identification & Tracking
Target Identification & Tracking
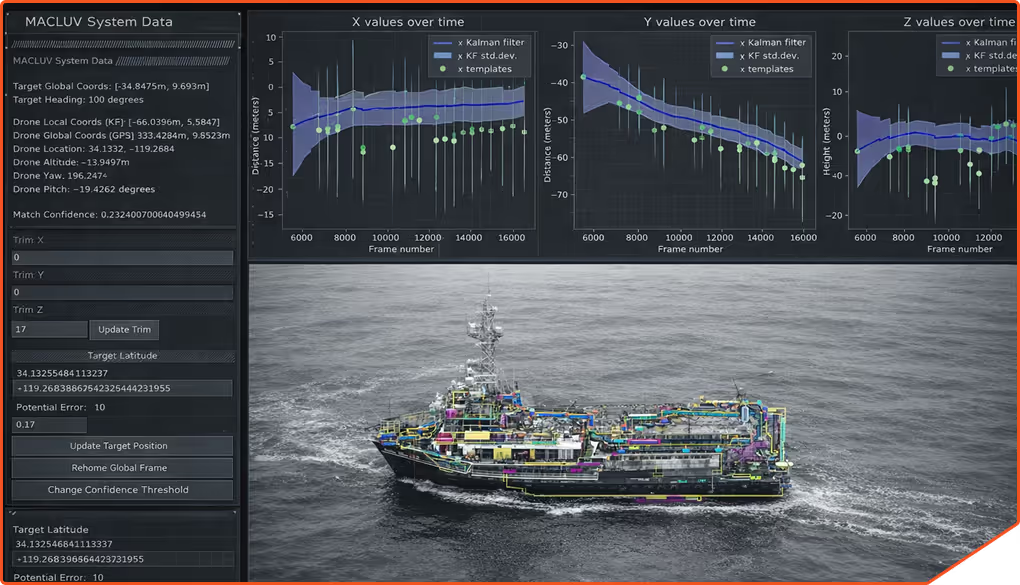
UAV locates and tracks a moving target using visual or thermal imagery and a referenced 3D model.
Landing Zone Selection
Landing Zone Selection
As it approaches, UAV autonomously identifies a suitable landing spot on the moving target, factoring in motion, obstacles, and environment.
3D Mapping & Navigation
3D Mapping & Navigation
UAV builds a 3D map of the area to assist in navigation and avoid obstacles during approach.
Precision Landing
Precision Landing
UAV performs a controlled descent and lands precisely on the moving target, compensating for movement and maintaining stability.
ATAK-LM has been rigorously tested in real-world operational environments, including:
Trident Spectre – a premier U.S. military exercise for evaluating advanced maritime and autonomous technologies.
Coastal Trident – a leading maritime security and operational experimentation program focused on naval and port defense.

Weather Sensing UAS swarm
Real Object Detection with 3D positioning and awareness in space
Real-time detection and visualization
Attritiable Strike Platform
Long Range One Way Strike Platform
Compact, Deployable Strike Platform
Attritiable Strike Platform
US NDAA compliant flight controller
custom-designed UAS camera payload
modular hybrid electric propulsion system
next-generation generator
Description
Description